
Dynamicurve -The Kinetic Facade
A Soft Robotic Facade system controlled by hand gestures through a camera or detect the light of the interior.
Studio Work with Luisa, Bartlett School of Architecture, 2024
Abstract based on this project was accpeted by CDRF2025(Digital Futures), developing full content for further review


















Motivation
As we know, almost all kinds of façade are somehow dealing with the shading problems. Looking into the types of existing façade system, responsive kinetic facades are the most suitable. However, the majority explorations have been done are using rigid body. We want to explore the potential of soft materials which could be actuated by robotic parts to achieve different states. And based on our motivation, our research context is about lightweight elastic structures, elastic kinetics, and kinetic facades. We aim to develop an intelligent facade system that can adaptively respond to both human needs and environmental conditions. By utilizing sensors and actuators, the system will adjust the transparency of the facade panels in real time to optimize natural light penetration, privacy, thermal comfort, and shadow management. The facade will seamlessly transition between two distinct states: a fully open configuration allowing at least 60% of light to pass through and a fully closed state with near-zero light permeability. This system aims to leverage the behavior of the material to create a dramatic change between two extreme stages (open, and close)。
Bending Active Tensile Hybrids (BATH)
When we started to research soft material actuation systems, the bending active tensile hybrids system draw our attention at the first place since bending actuation is kind of easy to achieve with some simple robotic parts. The structure is balanced between tensile and elastically bent. The flexibility and lightness inherent to bending-active structures integrates well with the pre-stressed membrane structures that are themselves flexible and adjust to applied loads.

Design
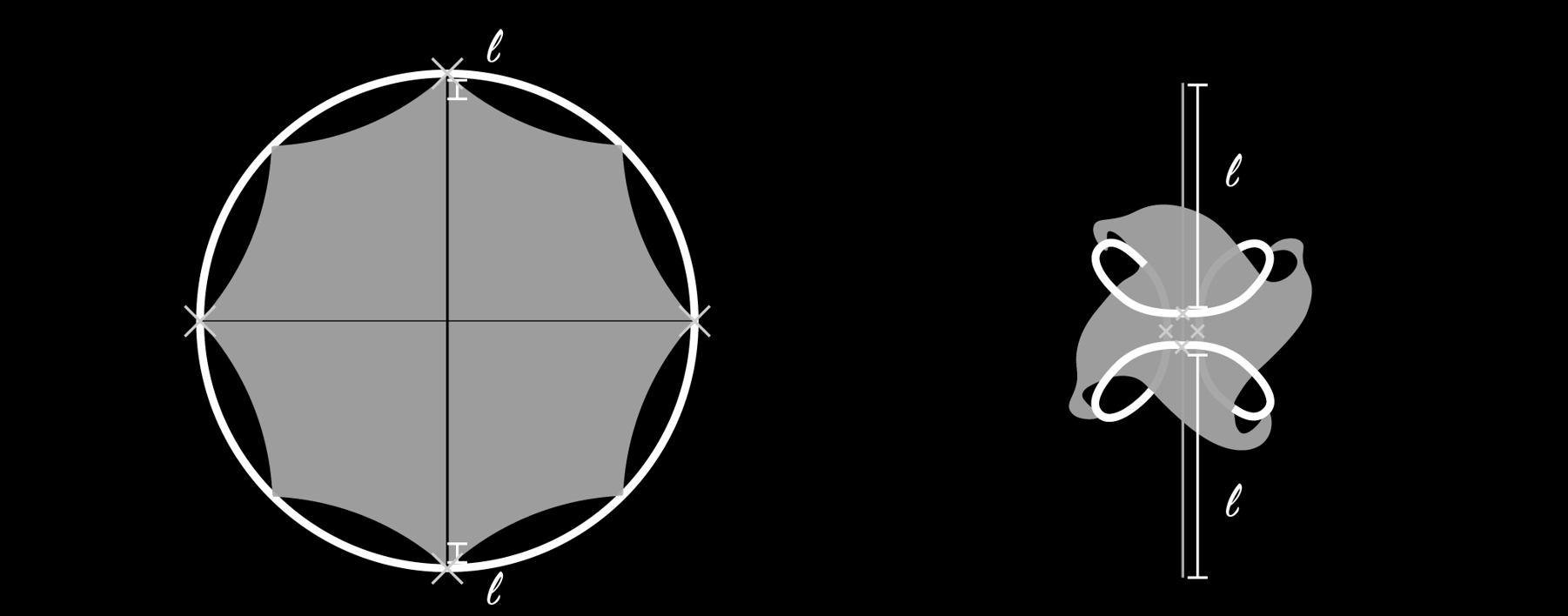
The design of the robotic façade began with exploring the concept of using a bending rod and elastic fabric as the primary means of achieving movement. We then evaluated the potential of both open-loop and closed-loop control systems to govern the behavior of the mechanism. Below explorations are simulated by Kangaroo in Grasshopper.
Option 1, Bending active self-centered
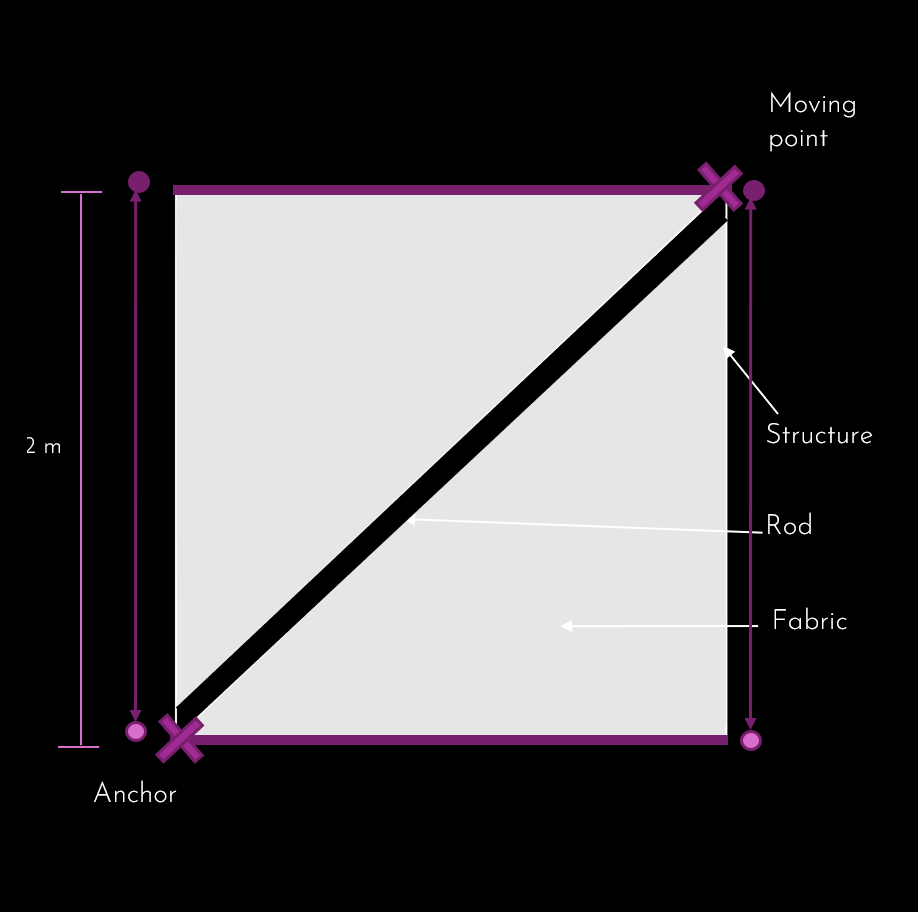
Option 2, Bending active along diagonal (3 anchor points)
Option 3, Bending active along diagonal (1 anchor point, 2 line anchor)
Option 4, Bending active along x-axis and y-axis ( 2 line anchor)
Option 5, Bending active along x-axis (2 line anchor) (opposite)
Open-Loop







Closed-Loop

Robotic System
In this project, we use 2 Dynamixel XL430-W250-T to control the bending activity. The U2D2 is used for the communication between computer and the servo.

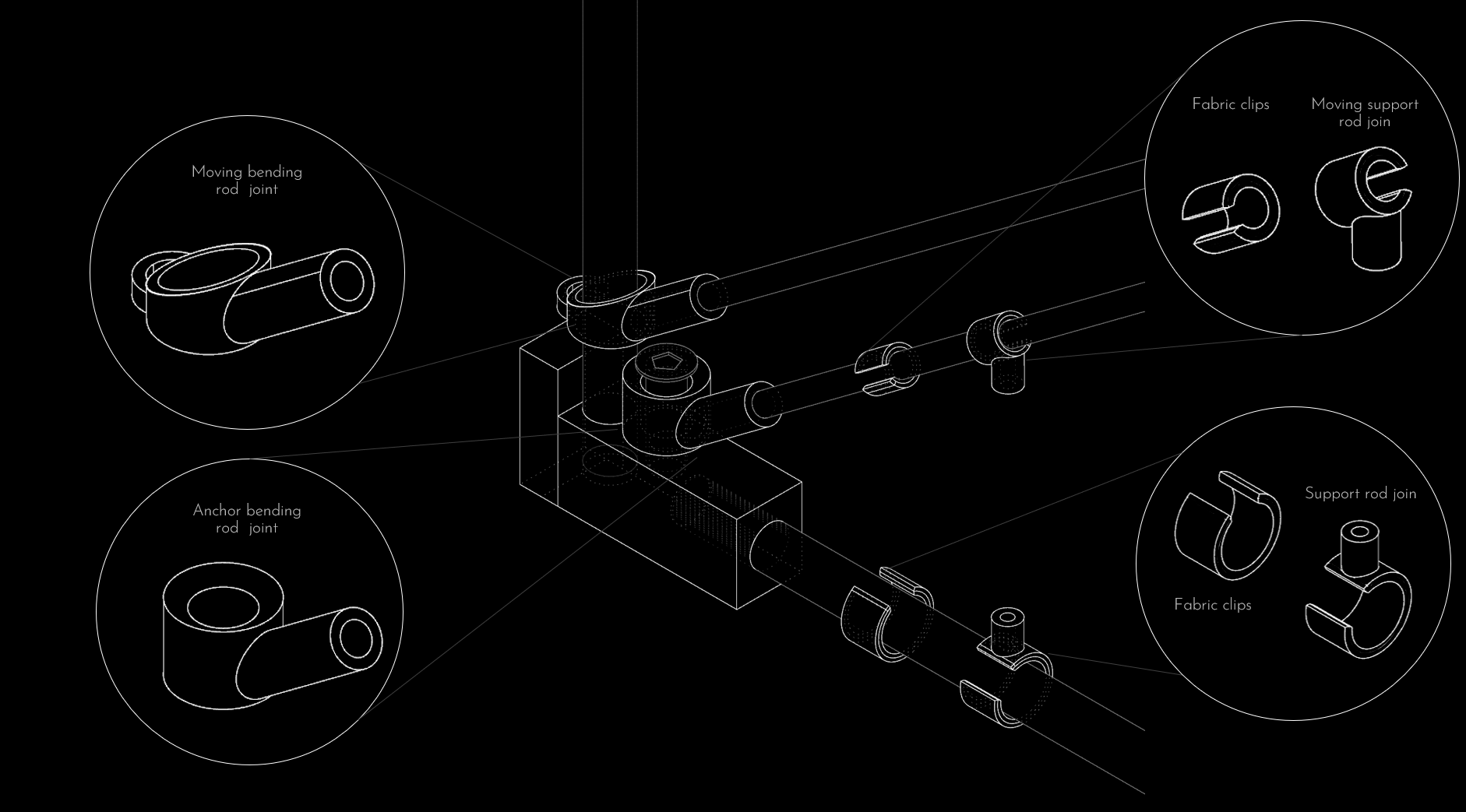
Structure Detail
Control Logic

Machine Vision Test, OpenCV&MediaPipe Library
Prototype Setup

Demo
These demos indicate how to interact with the system. Auto adjust the states according to light contidtion, controled by human gesture, controled by UI.